



The Remodel Skills Summits initiating up October 13th with Low-Code/No Code: Enabling Endeavor Agility. Register now!
The human hand is surely one of many charming creations of nature, and surely one of many highly sought targets of man made intelligence and robotics researchers. A robotic hand that would possibly perhaps also manipulate objects as we plan would possibly perhaps perhaps be seriously counseled in factories, warehouses, offices, and properties.
Yet no topic colossal progress in the self-discipline, research on robotics fingers stays extraordinarily costly and puny to a pair very well to effect companies and research labs.
Now, contemporary research guarantees to plan robotics research available to handy resource-constrained organizations. In a paper published on arXiv, researchers at the College of Toronto, Nvidia, and other organizations catch offered a recent plan that leverages highly efficient deep reinforcement finding out ways and optimized simulated environments to prepare robotic fingers at a fraction of the prices it would possibly perhaps perhaps on the total take.
Table of Contents
Training robotic fingers is costly
OpenAI educated an AI-powered robotic hand to resolve the Rubik’s Cube (Image source: YouTube)
” info-image-meta=”{“aperture”:”0″,”credit ranking”:””,”digicam”:””,”caption”:””,”created_timestamp”:”0″,”copyright”:””,”focal_length”:”0″,”iso”:”0″,”shutter_speed”:”0″,”title”:””,”orientation”:”0″}” info-image-title=”openai robotic hand rubiks dice” info-gargantuan-file=”https://i0.wp.com/bdtechtalks.com/wp-inform material/uploads/2019/10/openai-robotic-hand-rubiks-dice.png?match=696%2C388&ssl=1″ info-lazy-loaded=”1″ info-medium-file=”https://i0.wp.com/bdtechtalks.com/wp-inform material/uploads/2019/10/openai-robotic-hand-rubiks-dice.png?match=300%2C167&ssl=1″ info-orig-file=”https://i0.wp.com/bdtechtalks.com/wp-inform material/uploads/2019/10/openai-robotic-hand-rubiks-dice.png?match=2016%2C1124&ssl=1″ info-orig-dimension=”2016,1124″ info-permalink=”https://bdtechtalks.com/2019/10/21/openai-rubiks-dice-reinforcement-finding out/openai-robotic-hand-rubiks-dice/” info-recalc-dims=”1″ height=”388″ loading=”lazy” src=”https://i0.wp.com/bdtechtalks.com/wp-inform material/uploads/2019/10/openai-robotic-hand-rubiks-dice.png?resize=696%2C388&ssl=1″ width=”696″>
Above: OpenAI educated an AI-powered robotic hand to resolve the Rubik’s Cube (Image source: YouTube)
For all we know, the skills to plan human-love robots isn’t very here yet. On the choice hand, given ample sources and time, that you just might plan well-known progress on swear projects equivalent to manipulating objects with a robotic hand.
In 2019, OpenAI offered Dactyl, a robotic hand that would possibly perhaps also manipulate a Rubik’s dice with spectacular dexterity (even supposing silent seriously heinous to human dexterity). But it took 13,000 years’ worth of coaching to web it to the level the save it’ll also deal with objects reliably.
How plan you match 13,000 years of coaching into a instant time-frame? Thankfully, many instrument projects will doubtless be parallelized. You can prepare quite a lot of reinforcement finding out brokers at the same time as and merge their learned parameters. Parallelization can assist to chop assist the time it takes to prepare the AI that controls the robotic hand.
On the choice hand, bustle comes at a fee. One resolution is to plan thousands of bodily robotic fingers and prepare them concurrently, a direction that would possibly perhaps perhaps be financially prohibitive even for the wealthiest tech companies. One more resolution is to make swear of a simulated atmosphere. With simulated environments, researchers can prepare a whole bunch of AI brokers at the same time, and then finetune the model on a exact bodily robot. The combination of simulation and bodily training has change into the norm in robotics, self reliant driving, and other areas of research that require interactions with the exact world.
Simulations catch their catch challenges, on the choice hand, and the computational prices can silent be too famous for smaller companies.
OpenAI, which has the monetary backing of some of the well-known wealthiest companies and investors, developed Dactyl the swear of costly robotic fingers and an plot more costly compute cluster comprising around 30,000 CPU cores.
Lowering the prices of robotics research
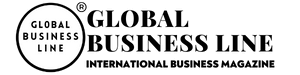
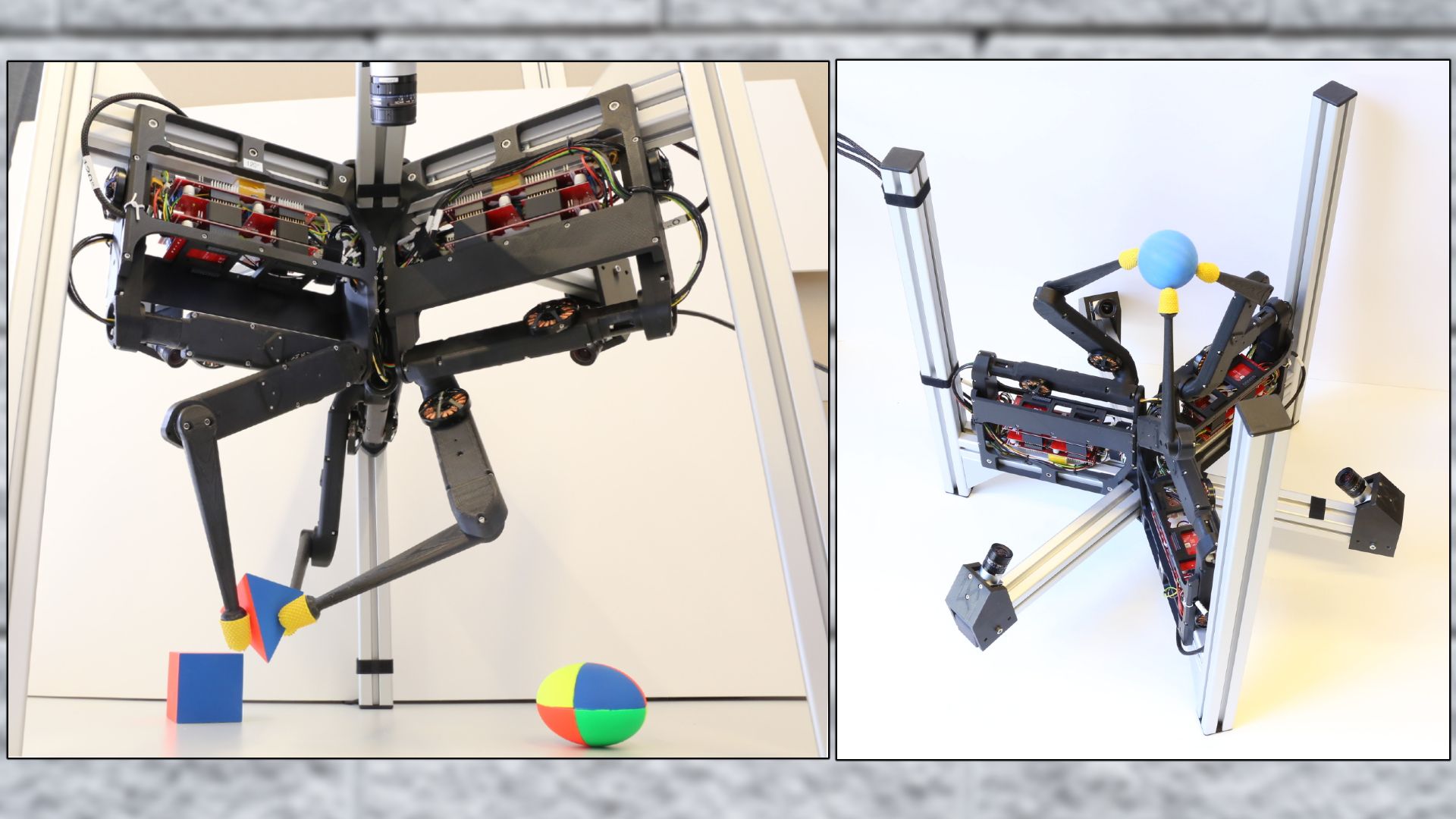
In 2020, a neighborhood of researchers at the Max Planck Institute for Clever Systems and Original York College proposed an launch-source robotic research platform that became dynamic and broken-down affordable hardware. Named TriFinger, the plan broken-down the PyBullet physics engine for simulated finding out and a low-fee robotic hand with three fingers and 6 levels of freedom (6DoF). The researchers later launched the Actual Robotic Exclaim (RRC), a Europe-essentially based entirely mostly platform that gave researchers some distance away web admission to to bodily robots to envision their reinforcement finding out items on.
The TriFinger platform decreased the prices of robotic research but silent had several challenges. PyBullet, which is a CPU-essentially based entirely mostly atmosphere, is noisy and slack and makes it laborious to prepare reinforcement finding out items efficiently. Unhappy simulated finding out creates complications and widens the “sim2real gap,” the efficiency fall that the educated RL model suffers from when transferred to a bodily robot. As a end result, robotics researchers must buckle down and do quite a lot of cycles of switching between simulated training and bodily attempting out to tune their RL items.
“Old work on in-hand manipulation required gargantuan clusters of CPUs to dart on. Furthermore, the engineering effort required to scale reinforcement finding out solutions has been prohibitive for most research groups,” Arthur Allshire, lead author of the paper and a Simulation and Robotics Intern at Nvidia, told TechTalks. “This meant that no topic progress in scaling deep RL, extra algorithmic or programs progress has been sophisticated. And the hardware fee and repairs time associated with programs such because the Shadow Hand [used in OpenAI Dactyl] … has puny the accessibility of hardware to envision finding out algorithms on.”
Building on prime of the work of the TriFinger personnel, this contemporary neighborhood of researchers aimed to pork up the usual of simulated finding out while keeping the prices low.
Training RL brokers with single-GPU simulation
” info-image-meta=”{“aperture”:”0″,”credit ranking”:””,”digicam”:””,”caption”:””,”created_timestamp”:”0″,”copyright”:””,”focal_length”:”0″,”iso”:”0″,”shutter_speed”:”0″,”title”:””,”orientation”:”1″}” info-image-title=”Nvidia some distance away simulated robot training” info-gargantuan-file=”https://i2.wp.com/bdtechtalks.com/wp-inform material/uploads/2021/09/Nvidia-some distance away-simulated-robot-training.jpg?match=696%2C358&ssl=1″ info-lazy-loaded=”1″ info-medium-file=”https://i2.wp.com/bdtechtalks.com/wp-inform material/uploads/2021/09/Nvidia-some distance away-simulated-robot-training.jpg?match=300%2C154&ssl=1″ info-orig-file=”https://i2.wp.com/bdtechtalks.com/wp-inform material/uploads/2021/09/Nvidia-some distance away-simulated-robot-training.jpg?match=1228%2C632&ssl=1″ info-orig-dimension=”1228,632″ info-permalink=”https://bdtechtalks.com/2021/09/27/nvidia-robotic-hand-simulation-training/nvidia-some distance away-simulated-robot-training/” info-recalc-dims=”1″ height=”358″ loading=”lazy” src=”https://i2.wp.com/bdtechtalks.com/wp-inform material/uploads/2021/09/Nvidia-some distance away-simulated-robot-training.jpg?resize=696%2C358&ssl=1″ width=”696″>
The researchers replaced the PyBullet with Nvidia’s Isaac Gym, a simulated atmosphere that can dart efficiently on desktop-grade GPUs. Isaac Gym leverages Nvidia’s PhysX GPU-accelerated engine to enable thousands of parallel simulations on a single GPU. It goes to give around 100,000 samples per 2nd on an RTX 3090 GPU.
“Our task is barely for handy resource-constrained research labs. Our manner took one day to prepare on a single desktop-stage GPU and CPU. Every academic lab working in machine finding out has web admission to to this stage of sources,” Allshire said.
In accordance with the paper, a whole setup to dart the plan, along with training, inference, and bodily robot hardware, will doubtless be purchased for below $10,000.
The efficiency of the GPU-powered digital atmosphere enabled the researchers to prepare their reinforcement finding out items in a high-fidelity simulation with out lowering the velocity of the finding out course of. Increased fidelity makes the finding out atmosphere more realistic, lowering the sim2real gap and the need for finetuning the model with bodily robots.
The researchers broken-down a pattern object manipulation task to envision their reinforcement finding out plan. As input, the RL model receives proprioceptive info from the simulated robot along with eight keypoints that signify the pose of the target object in three-d Euclidean region. The model’s output is the torques which would possibly perhaps perhaps be utilized to the motors of the robot’s nine joints.
The plan makes swear of the Proximal Policy Optimization (PPO), a model-free RL algorithm. Mannequin-free algorithms obviate the must compute the total essential ingredients of the atmosphere, which is computationally very costly, in particular whenever you’re dealing with the bodily world. AI researchers steadily survey fee-efficient, model-free alternate recommendations to their reinforcement finding out complications.
The researchers designed the reward of robotic hand RL as a steadiness between the fingers’ distance from the thing, the thing’s destination map, and the intended pose.
To extra pork up the model’s robustness, the researchers added random noise to varied ingredients of the atmosphere at some stage in training.
Sorting out on exact robots
Once the reinforcement finding out plan became educated in the simulated atmosphere, the researchers tested it in the exact world through some distance away web admission to to the TriFinger robots offered by the Actual Robotic Exclaim. They replaced the proprioceptive and image input of the simulator with the sensor and digicam info offered by the some distance away robot lab.
The educated plan transferred its abilities to the exact robot a seven-p.c fall in accuracy, a formidable sim2real gap development in comparability to old solutions.
The keypoint-essentially based entirely mostly object monitoring became in particular counseled in guaranteeing that the robot’s object-handling capabilities generalized all over varied scales, poses, prerequisites, and objects.
“One limitation of our manner — deploying on a cluster we did not catch sigh bodily web admission to to — became the topic in attempting other objects. On the choice hand, we were in a region to take a scrutinize at other objects in simulation and our insurance policies proved reasonably sturdy with zero-shot transfer efficiency from the dice,” Allshire said.
The researchers express that the same methodology can work on robotic fingers with more levels of freedom. They did not catch the bodily robot to measure the sim2real gap, however the Isaac Gym simulator additionally entails complex robotic fingers such because the Shadow Hand broken-down in Dactyl.
This methodology will doubtless be built-in with other reinforcement finding out programs that address other facets of robotics, equivalent to navigation and pathfinding, to make a more full resolution to prepare cell robots. “To illustrate, that you just might even catch our manner controlling the low-stage alter of a gripper while increased stage planners and even finding out-essentially based entirely mostly algorithms are in a region to feature at a increased stage of abstraction,” Allshire said.
The researchers mediate that their work offers “a direction for democratization of robot finding out and a viable resolution through gargantuan scale simulation and robotics-as-a-service.”
Ben Dickson is a instrument engineer and the founding father of TechTalks. He writes about skills, industry, and politics.
This yarn originally seemed on Bdtechtalks.com. Copyright 2021
VentureBeat
VentureBeat’s mission is to be a digital town square for technical willpower-makers to supply info about transformative skills and transact.
Our situation delivers mandatory info on info applied sciences and solutions to data you as you lead your organizations. We invite you to alter into a member of our community, to web admission to:
- up-to-date info on the matters of hobby to you
- our newsletters
- gated idea-leader inform material and discounted web admission to to our prized events, equivalent to Remodel 2021: Study Extra
- networking capabilities, and more





{kind=link}
{kind=link}